问题动机
当前前沿的 tracker 大多基于 template matching 方法,但大多 tracker 在同一时间只使用目标的单张 template,其 updating 过程始终基于当前目标仍与原始 template 有较高相似度的假设,因而在目标发生较大形态变化时便会丢失目标,如图所示:

主要贡献
- 以 Multi-template module 为基础,使用长短期特征结合的方式进行跟踪,较好地解决了传统 single-template tracker 在 updating 过程中的漂移问题。
- 可以很容易地用于其他 tracker 而不需特别训练,在 accuracy 和 robustness 均有提升的情况下速度几乎没有降低。
解决思路
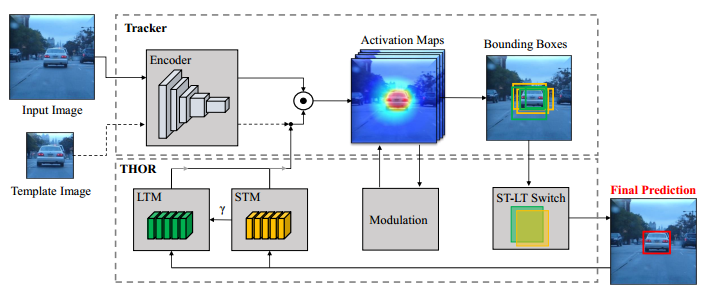
为了获得关于目标动态变化的较好表达,作者提出了一种基于 STM(short-term module) 和 LTM(long-term module) 构成的 multi-template 框架,如上图所示。其中,STM 和 LTM 分别用于描述模板的短期更新和目标在较长一段时间内的外观变化。
对每帧模板 $T_i$,由 Siamese Network 从中提取特征$f_i$ ,之后用当前获取的所有特征构建 Gram 矩阵: $$ G(f_1, \cdots, f_n) = \begin{bmatrix}f_1 \star f_1 & f_1 \star f_2 & \cdots & f_1 \star f_n \\vdots & \vdots & \ddots & \vdots \f_n \star f_1 & f_n \star f_2 & \cdots & f_n \star f_n\end{bmatrix} $$
Gram 矩阵对两两特征间进行卷积运算,用于表示其间相关性和不同特征分别在图像中出现的量,在图像风格迁移 (Justin Johnson etc., ECCV 2016) 中引入用于表示图像的整体风格。
其中 $G$是一个 $n \times n$ 矩阵,且通常$n$ 比特征空间的维度要小。
LTM 的目的是维护一个关于当前目标的最具多样性的模板的集合,因而从当前获取的特征中选取一定数量的最具多样性的特征,以最大化由特征向量 ${f_1, f_2, \cdots, f_n}$构成的平行多面体的体积 $\Gamma(f_1, f_2, \cdots, f_n)$;而 $G$的行列式(即$|G|$)为${f_1, f_2, \cdots, f_n}$ 构成的平行多面体的体积之平方。因此目标函数为 $$ \max_{f_1, f_2, \cdots, f_n} \Gamma(f_1, \cdots, f_n) \propto \max_{f_1, f_2, \cdots, f_n}|G(f_1, f_2, \cdots, f_n)| $$ LTM 的更新方法为:当某个模板可增大 $|G|$ 时,说明其更具多样性,此时用其替换 LTM 集合中的对应模板。同时,为了避免 漂移问题,作者为更新过程设置了 lower bound,新的模板需要满足如下条件: $$ f_c \star f_1 > \ell \cdot G_{11} - \gamma $$ 同时,对于 abrupt movements 和 partial occlusion,此时模板与原始模板相似度过低,LTM 在这种情况下不适用;因此类似传统 tracker,作者设置了 STM 模块来维护当前所在帧附近一段短期时间中的时序信息。STM 采用 FIFO 的方式更新模板,并构建对应的 Gram 矩阵 $G_{st}$。但通过 Gram 行列式的值进行计算的方法在 STM 上表现并不好,因此作者采用以下方式度量 diversity $$ \gamma = 1 - \frac{2}{N(N+1)G_{st,max}}\sum_{i<j}^N G_{st,ij} $$ 其中 $\gamma \in [0,1]$,且当 $\gamma$越靠近$1$ 时,说明 STM 中模板 diversity 程度越高。
在实际跟踪过程中,出于应对短期变化的考虑,大部分情况下使用 STM 特征;当发生模板漂移时,选择使用 LTM 特征,同时重新初始化 STM 特征。
实验
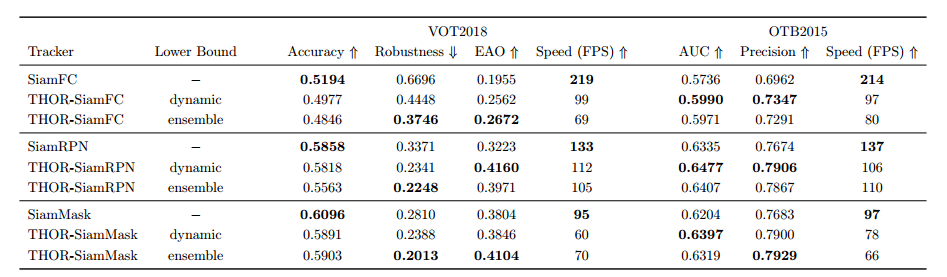
可以看到应用 THOR 方法后,跟踪器的 robustness 提升显著,但在 VOT 和 OTB 数据集中 accuracy 的表现差异较大,OTB 的情况下有不错提升但 VOT 中没什么效果,推测是因为加入颜色特征后目标发生剧烈变化时与 origin template 差别太大导致 LTM 大部分情况下没起作用,大部分时候仍使用 STM 特征,而 OTB 的灰度特征因为只主要与目标的外形变化有关因而 LTM 特征可以顺利得以应用。此外,THOR 的这个情况和 CSR-DCF 的情况刚好相反,比较有意思。